网站新闻
概要
本文设计了一种基于RFID的智能交通控制,采用RFID 技术检测交叉路口附近的车辆,智能交通控制信号机根据采集到的车辆信息,选择合适的路口控制模式自适应地控制车辆通行时间,从而保证车辆通行质量。
详细内容
1 引言
为了缓解交通压力,降低修路资金投入,减少车辆延误,节能减排,设计智能交通控制是建设资源节约型社会的必然选择。本文设计了一种基于RFID的智能交通控制,采用RFID 技术检测交叉路口附近的车辆,智能交通控制信号机根据采集到的车辆信息,选择合适的路口控制模式自适应地控制车辆通行时间,从而保证车辆通行质量。
2 路口控制模式
传统的路口控制模式是定时控制,路*通信号灯的延时时间是固定的,不能根据车辆的流量自适应地动态调节延时时间,从而造成车辆延误时间长及不必要的拥塞等情况。先进的路口控制模式有模糊控制、绿波带模式、夜间模式和急停模式。模糊控制模式根据随机的车辆流量智能完成模糊增减交通信号控制时间。绿波带模式在单向车辆高峰期时将各个路口间红绿灯起始点亮时间延宕一定量来保证车辆一路畅行。夜间控制模式在夜晚车辆流量为零负荷的状态使用,仅使用黄灯警示开车司机,减少能源和时间的消耗。急停模式为紧急车辆开辟通行空间,在紧急车辆方向开启绿灯,别的方向开启红灯。本设计提出在不同的时段采用不同的控制模式,在9: 00- 11: 30,14: 30- 17: 30和20: 30- 24: 00时段采用模糊控制模式; 在5: 30- 9: 00,11: 30- 14: 30和17: 30- 20: 30时段采用绿波带模式; 在0: 00- 5: 30时段采用夜间控制模式; 在检测到紧急车辆时采用急停控制模式。选择多种控制模式可以实现交通控制的合理化,从实际上缓解交通路口的压力。具体的时段设置可以根据具体的区域或车辆流量由信号机重设或修改。
3 智能交通控制设计
3. 1 智能交通控制信号机设
3 .1 .1 信号机硬件设计:
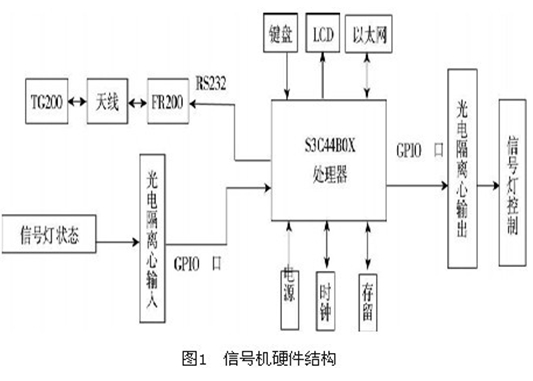
国内信号机主要分为2类: 一类采用8 /16位单片机作为处理器,功能简单、方案单一,难以实现区域交通协调控制,不能适应现代化交通控制的要求; 另一类是基于工控机或PC104,功能虽然强大,但由于工控机和PC104都是按通用计算机标准设计,并非专门针对信号机应用设计,硬件结构复杂,成本高。国外的信号机(如西门子公司的2070和美国的EAGLE )起步早,水平高,但不适用于中国混合交通模式,且价格昂贵,操作不方便。本文选择基于ARM 核的32位嵌入式R ISC 处理器S3C44B0X进行智能交通信号机硬件设计,以达到采集与处理交通流数据、通信联网以及区域协调控制的设计目的,信号机硬件结构如图1所示。
为了缓解交通压力,降低修路资金投入,减少车辆延误,节能减排,设计智能交通控制是建设资源节约型社会的必然选择。本文设计了一种基于RFID的智能交通控制,采用RFID 技术检测交叉路口附近的车辆,智能交通控制信号机根据采集到的车辆信息,选择合适的路口控制模式自适应地控制车辆通行时间,从而保证车辆通行质量。
2 路口控制模式
传统的路口控制模式是定时控制,路*通信号灯的延时时间是固定的,不能根据车辆的流量自适应地动态调节延时时间,从而造成车辆延误时间长及不必要的拥塞等情况。先进的路口控制模式有模糊控制、绿波带模式、夜间模式和急停模式。模糊控制模式根据随机的车辆流量智能完成模糊增减交通信号控制时间。绿波带模式在单向车辆高峰期时将各个路口间红绿灯起始点亮时间延宕一定量来保证车辆一路畅行。夜间控制模式在夜晚车辆流量为零负荷的状态使用,仅使用黄灯警示开车司机,减少能源和时间的消耗。急停模式为紧急车辆开辟通行空间,在紧急车辆方向开启绿灯,别的方向开启红灯。本设计提出在不同的时段采用不同的控制模式,在9: 00- 11: 30,14: 30- 17: 30和20: 30- 24: 00时段采用模糊控制模式; 在5: 30- 9: 00,11: 30- 14: 30和17: 30- 20: 30时段采用绿波带模式; 在0: 00- 5: 30时段采用夜间控制模式; 在检测到紧急车辆时采用急停控制模式。选择多种控制模式可以实现交通控制的合理化,从实际上缓解交通路口的压力。具体的时段设置可以根据具体的区域或车辆流量由信号机重设或修改。
3 智能交通控制设计
3. 1 智能交通控制信号机设
3 .1 .1 信号机硬件设计:
国内信号机主要分为2类: 一类采用8 /16位单片机作为处理器,功能简单、方案单一,难以实现区域交通协调控制,不能适应现代化交通控制的要求; 另一类是基于工控机或PC104,功能虽然强大,但由于工控机和PC104都是按通用计算机标准设计,并非专门针对信号机应用设计,硬件结构复杂,成本高。国外的信号机(如西门子公司的2070和美国的EAGLE )起步早,水平高,但不适用于中国混合交通模式,且价格昂贵,操作不方便。本文选择基于ARM 核的32位嵌入式R ISC 处理器S3C44B0X进行智能交通信号机硬件设计,以达到采集与处理交通流数据、通信联网以及区域协调控制的设计目的,信号机硬件结构如图1所示。
信号机需要存放引导程序、操作系统和应用程序等数据,系统启动后操作系统和程序运行需要更大的空间,因此设计外存储单元以扩展存储空间,存储器模块包括8MB的SDRAM、2MB的NorFlash和16MB的N andFlash。存储器用来存储时段、相位等其他参数。信号机要采集车辆流量信息,车辆流量检测模块由射频标签、天线和射频读写器组成。设计中射频标签为TG200,射频读写器为FR200。S3C44B0x没有集成网络控制器,故选用NE2000兼容的以太网控制器芯片RTL8019来扩展以太网。液晶显示与键盘模块用来手动设置或者修改交通信号机的控制参数。通过ZLG7290B扩展一个4 4的键盘矩阵,ZLG7290B 通过IIC串行总线与处理器进行连接; S3C44B0X内置LCD驱动控制器,能够自动产生LCD 驱动控制所需的控制信号,因此S3C44B0X可以与LCD直接连接,而不需要另外加LCD控制器。系统还设计了电源模块、RTC (实时时钟)模块等。设计的信号机具有控制参数输入、保存、控制状态输出、灯态输出控制、交通参数实时检测与存储、配时方案存储、倒计时牌控制、以太网及与手持终端通讯等功能。
3 .1 .2 信号机软件设计
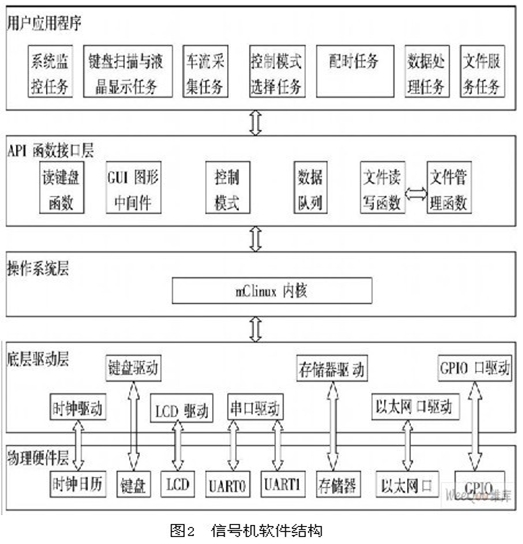
信号机利用中断方式接收交通参数和发布控制指令。现代智能信号机需要同时执行信号灯色状态、相位与倒计时控制、配时优化、通讯和车流量检测等多个任务。为了解决多任务同时运行所带来的程序结构混乱、功能受限、效率低下等问题,引入嵌入式操作系统uC linux 以支持多种文件系统、模块化设计和基于计算机网络的通信。uC linux内核可以完成进程管理、内存管理、文件系统、设备控制和网络实现等功能,内核采用模块化设计,许多功能块可以独立地增加或删除,当重新编译内核时,选择嵌入式设备所需要的功能模块,删除冗余的功能模块。通过重新配置内核,可以减小系统运行所需要的内核,缩减资源使用量,从而显着减少系统运行所需的硬件资源。
信号机软件由系统监控、车流量采集、路口控制模式选择、配时、键盘扫描与液晶显示模块构成。基于uC linux的信号机软件结构如图2所示。
3 .1 .2 信号机软件设计
信号机利用中断方式接收交通参数和发布控制指令。现代智能信号机需要同时执行信号灯色状态、相位与倒计时控制、配时优化、通讯和车流量检测等多个任务。为了解决多任务同时运行所带来的程序结构混乱、功能受限、效率低下等问题,引入嵌入式操作系统uC linux 以支持多种文件系统、模块化设计和基于计算机网络的通信。uC linux内核可以完成进程管理、内存管理、文件系统、设备控制和网络实现等功能,内核采用模块化设计,许多功能块可以独立地增加或删除,当重新编译内核时,选择嵌入式设备所需要的功能模块,删除冗余的功能模块。通过重新配置内核,可以减小系统运行所需要的内核,缩减资源使用量,从而显着减少系统运行所需的硬件资源。
信号机软件由系统监控、车流量采集、路口控制模式选择、配时、键盘扫描与液晶显示模块构成。基于uC linux的信号机软件结构如图2所示。
3 .2 基于RFID技术的车辆检测
3 .2 .1基于RFID 的车辆检测方案
射频识别( Radio Frequency Ident ification) 技术是一种非接触的自动识别技术,它利用射频信号和空间耦合(电感和电磁耦合)传输特性,在读卡器和射频卡之间进行无线双向通信,实现对被识别物体的自动识别[ 8] 。最基本的RF ID系统由读写器、天线、电子标签三部分组成。RFID 采用存储在电子标签中的唯一的ID标识物体,读写器自动高速地收集识别范围内的标签信息数据,从而实现自动识别物品和收集物品标志信息的功能。因此,RFID技术对任何移动对象都可以进行实时的定位、跟踪和监测。
在智能交通控制过程中,信号机要根据实时采集的车辆信息来选择路口控制模式,本设计基于RF ID 技术进行车辆检测。这种方案无须对现有红绿灯设备进行拆卸,只需对车辆粘贴相应的电子标签,在原有红绿灯基础上安装RFID 读写设备及调整信号灯控制器软件。在车辆前挡风玻璃上粘贴RFID 标签,在交叉路口四个方向的红绿灯前50米- 70米安装RFID 读写器,读写器斜对马路(扩大接收范围) ,检测交叉路口附近的车辆流量,根据采集的车辆数据,选择合适的控制模式并调节信号灯。当某个相位的车辆流量比其他相位大且该相位绿灯亮时,则适当地延长该相位的绿灯周期(绿灯周期不超过最大绿灯周期) ,保证车辆有充裕的时间通过路口; 如果该相位红灯亮,则适当地缩短红灯周期(红灯周期不小于最小红灯周期) ,减少车辆等候时间,尽可能减少车辆在交叉口的延误的时间。
由于城市道路情况复杂,很容易对标签卡的微波信号进行反射衍射,为防止同一RFID 卡号被多个读卡器读取到,从而导致车辆检测错误,通过软件进行设定,一旦读到RFID 卡信号,则后续读卡器在规定时间内(如30秒)对此RFID卡号进行屏蔽,这样可以避免同一ID 号被一条马路上两台读卡器读到后对信息的误判。
将每辆车的RFID 卡的ID号作为关键字段建立数据库。将车辆的ID 号与车牌号关联可以建立车辆有关参数数据库,主要包括车型、发动机号、底盘号、出厂日期、年审时限、养路费交纳时限以及违章记录等; 通过车牌号与车主的对应关系,可以建立车主有关信息数据库,主要包括姓名、年龄、性别、单位、户籍以及联系电话(包括固定电话和移动电话)等。在确立了基本参数库后,针对车辆的一些运行情况,还设置了一些记录车辆违章时间及地点等参数的字段; 在数据库中还建立一些图形文件库,可以记录车辆照片、车主照片以及车辆违章照片。数据库中还建立车辆的优先权限,公交车辆设置为普通优先,特殊车辆(如消防车,急救车,警车)设置为绝对优先。一旦检测到特殊车辆的标签信号,则采用急停控制模式,绝对绿灯,保证特殊车辆顺畅通行。
3 .2 .2 基于RFID 的车辆检测实现
本设计采用有源标签TG200来标识车辆,FR200多功能RFID 读写器来读取RFID 卡信息,TG200 和FR200的工作频率为433MH z,最大识别距离为150米,通信速率为250Kbps,具有投入成本低、可靠性高,安全性高、维护简便、安装实施简单等优点。RFID 读写器通过RS232接口与S3C44B0x 处理器连接,处理器负责完成PC 和FR200读写器之间数据的传送和控制。
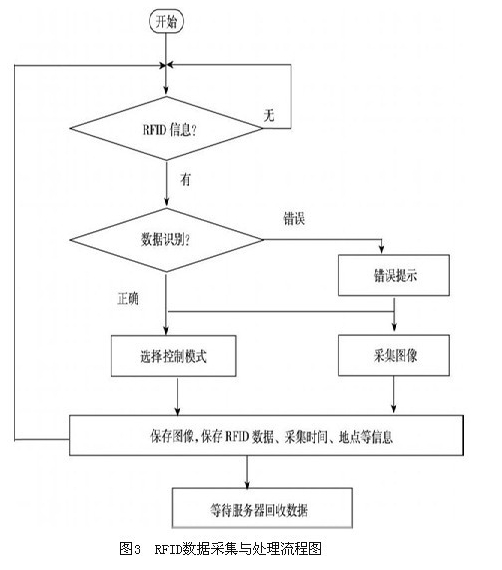
RFID 数据采集模块包括: 天线、RF发送电路及RF接收电路、解调电路、电源、外部通信接口等,其外部通信接口最终输出正确的RFID 卡ID 信息。RFID 数据采集与处理流程图如图3 所示。车辆档案数据(如车号、单位、优先权限等)统一存储在一个file tx t的文件中,作为数据识别进程的数据依据,判断电子标签ID信息是否合法。如果判断电子标签ID 信息为NULL,则进行报警提示等处理; 如果判断电子标签ID 信息为特殊车辆数据,则进行优先控制、数据保存等。RFID 信息、采集时间、地点等数据按格式保存在一个* tx t文件中。最后,服务器通过以太网与路口控制终端设备建立TCP / IP连接,路口控制终端设备将保存的文件上传至服务器供管理系统处理。上传成功的文件将从本地F lash中删除,本地Flash由于容量有限,采用轮循存储的办法,保存的数据超出50MB 后,将从存储范围的开始处往后覆盖原来的文件。
3 .2 .1基于RFID 的车辆检测方案
射频识别( Radio Frequency Ident ification) 技术是一种非接触的自动识别技术,它利用射频信号和空间耦合(电感和电磁耦合)传输特性,在读卡器和射频卡之间进行无线双向通信,实现对被识别物体的自动识别[ 8] 。最基本的RF ID系统由读写器、天线、电子标签三部分组成。RFID 采用存储在电子标签中的唯一的ID标识物体,读写器自动高速地收集识别范围内的标签信息数据,从而实现自动识别物品和收集物品标志信息的功能。因此,RFID技术对任何移动对象都可以进行实时的定位、跟踪和监测。
在智能交通控制过程中,信号机要根据实时采集的车辆信息来选择路口控制模式,本设计基于RF ID 技术进行车辆检测。这种方案无须对现有红绿灯设备进行拆卸,只需对车辆粘贴相应的电子标签,在原有红绿灯基础上安装RFID 读写设备及调整信号灯控制器软件。在车辆前挡风玻璃上粘贴RFID 标签,在交叉路口四个方向的红绿灯前50米- 70米安装RFID 读写器,读写器斜对马路(扩大接收范围) ,检测交叉路口附近的车辆流量,根据采集的车辆数据,选择合适的控制模式并调节信号灯。当某个相位的车辆流量比其他相位大且该相位绿灯亮时,则适当地延长该相位的绿灯周期(绿灯周期不超过最大绿灯周期) ,保证车辆有充裕的时间通过路口; 如果该相位红灯亮,则适当地缩短红灯周期(红灯周期不小于最小红灯周期) ,减少车辆等候时间,尽可能减少车辆在交叉口的延误的时间。
由于城市道路情况复杂,很容易对标签卡的微波信号进行反射衍射,为防止同一RFID 卡号被多个读卡器读取到,从而导致车辆检测错误,通过软件进行设定,一旦读到RFID 卡信号,则后续读卡器在规定时间内(如30秒)对此RFID卡号进行屏蔽,这样可以避免同一ID 号被一条马路上两台读卡器读到后对信息的误判。
将每辆车的RFID 卡的ID号作为关键字段建立数据库。将车辆的ID 号与车牌号关联可以建立车辆有关参数数据库,主要包括车型、发动机号、底盘号、出厂日期、年审时限、养路费交纳时限以及违章记录等; 通过车牌号与车主的对应关系,可以建立车主有关信息数据库,主要包括姓名、年龄、性别、单位、户籍以及联系电话(包括固定电话和移动电话)等。在确立了基本参数库后,针对车辆的一些运行情况,还设置了一些记录车辆违章时间及地点等参数的字段; 在数据库中还建立一些图形文件库,可以记录车辆照片、车主照片以及车辆违章照片。数据库中还建立车辆的优先权限,公交车辆设置为普通优先,特殊车辆(如消防车,急救车,警车)设置为绝对优先。一旦检测到特殊车辆的标签信号,则采用急停控制模式,绝对绿灯,保证特殊车辆顺畅通行。
3 .2 .2 基于RFID 的车辆检测实现
本设计采用有源标签TG200来标识车辆,FR200多功能RFID 读写器来读取RFID 卡信息,TG200 和FR200的工作频率为433MH z,最大识别距离为150米,通信速率为250Kbps,具有投入成本低、可靠性高,安全性高、维护简便、安装实施简单等优点。RFID 读写器通过RS232接口与S3C44B0x 处理器连接,处理器负责完成PC 和FR200读写器之间数据的传送和控制。
RFID 数据采集模块包括: 天线、RF发送电路及RF接收电路、解调电路、电源、外部通信接口等,其外部通信接口最终输出正确的RFID 卡ID 信息。RFID 数据采集与处理流程图如图3 所示。车辆档案数据(如车号、单位、优先权限等)统一存储在一个file tx t的文件中,作为数据识别进程的数据依据,判断电子标签ID信息是否合法。如果判断电子标签ID 信息为NULL,则进行报警提示等处理; 如果判断电子标签ID 信息为特殊车辆数据,则进行优先控制、数据保存等。RFID 信息、采集时间、地点等数据按格式保存在一个* tx t文件中。最后,服务器通过以太网与路口控制终端设备建立TCP / IP连接,路口控制终端设备将保存的文件上传至服务器供管理系统处理。上传成功的文件将从本地F lash中删除,本地Flash由于容量有限,采用轮循存储的办法,保存的数据超出50MB 后,将从存储范围的开始处往后覆盖原来的文件。
4 结束语
本文提出了一种基于RFID 的智能交通控制设计,在不同的时段采用不同的路口控制模式,基于S3C44B0X处理器和uC linux操作系统开发智能交通控制信号机,采用有源标签TG200来标识车辆,在原有红绿灯基础上安装FR200多功能RFID读写器来读取RFID卡信息,由路口控制终端对RFID读写器采集到的RFID数据进行处理来实现车辆智能控制功能。


版权所有:深圳市玖锐技术有限公司 2008-2019 All Rights Reserved